Bremsausgleich erklärt/nl: Unterschied zwischen den Versionen
Die Seite wurde neu angelegt: „* Bron: [https://www.freiwald.com/forum/viewtopic.php?p=268318#p268318 Forum] * Uitvoerige beschrijving van Remcompensatie - adaptief remmen: De samenhang * Verder aanwijzigingen voor het inmeten zijn ook hier te vinden: Snelheidsprofiel maken / Lokomotieven "inmeten" * TC-wiki: Loks einmessen: Wofür brauche ich den…“ |
Übernehme Bearbeitung einer neuen Version der Quellseite |
||
| (5 dazwischenliegende Versionen von einem anderen Benutzer werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
<languages/> | <languages/> | ||
{{ | {{TC7891011gs}} | ||
__NOTOC__ | __NOTOC__ | ||
| Zeile 20: | Zeile 20: | ||
*Michael Mertner antwoordt in [https://www.freiwald.com/forum/viewtopic.php?p=268318#p268318 Forum] op de vraag: | *Michael Mertner antwoordt in [https://www.freiwald.com/forum/viewtopic.php?p=268318#p268318 Forum] op de vraag: | ||
Geen enkele. De remcompensatie is | Geen enkele. De remcompensatie is geen waarde, maar geeft een '''evenredigheid''' aan. Wat je het dichtst in de buurt zou kunnen noemen is "'''remdruk'''". | ||
<span id="Hohe_Werte_schlecht?"></span> | <span id="Hohe_Werte_schlecht?"></span> | ||
| Zeile 32: | Zeile 32: | ||
De waarde geeft aan, hoe de locomotief effectief "aan de regelaar" hangt. | De waarde geeft aan, hoe de locomotief effectief "aan de regelaar" hangt. | ||
In de regel blijft een locomotief niet onmiddellijk staan, wanneer | In de regel blijft een locomotief niet onmiddellijk staan, wanneer men de regelaar van de centrale op nul instelt. De decoder heeft een remvertraging, eventueel een vliegwiel in de motor, enz. Om deze vertraging "glad te strijken", wordt een remcompensatie ingesteld. Hiermee kan TrainController dan deze meer of minder grote vertragingen berekenen en het stoppunt precies bepalen. | ||
Als een remcompensatie van nul is ingesteld, gaat TrainController ervan uit, dat de locomotief ONMIDDELLIJK bij het instellen van nul in de centrale stopt. Dat ziet er niet alleen lelijk uit, maar levert ook risico's en ongeval gevaar, als de locomotief stopt alsof die tegen een muur is gereden. | Als een remcompensatie van nul is ingesteld, gaat TrainController ervan uit, dat de locomotief ONMIDDELLIJK bij het instellen van nul in de centrale stopt. Dat ziet er niet alleen lelijk uit, maar levert ook risico's en ongeval gevaar op, als de locomotief stopt alsof die tegen een muur is gereden. | ||
<span id="Bremsausgleich_Null"></span> | <span id="Bremsausgleich_Null"></span> | ||
| Zeile 41: | Zeile 41: | ||
Een remcompensatie van nul is daarom eerder ongewoon. Een meer of minder grote waarde is normaal. | Een remcompensatie van nul is daarom eerder ongewoon. Een meer of minder grote waarde is normaal. | ||
Hoewel ik niet uitsluit | Hoewel ik niet uitsluit dat een waarde nul mogelijk is. Als de locomotief bij het bepalen van de remcompensatie een nul als resultaat heeft, zou dat ook kunnen werken. Dat hangt echter o.a. met de snelheid bij het bepalen van de remcompensatie en de lengte van het meettraject samen. Als de snelheid niet te hoog is en het meettraject een zekere lengte overschrijdt, dan kan het zijn dan het verlagen van de snelheidsniveaus zo geleidelijk is, dat de decoder dat volgt. | ||
Om dezelfde reden zijn ook '''geen negatieve waardes mogelijk'''. Dat zou namelijk betekenen, dat de locomotief stop, VOORDAT op de regelaar in de centrale snelheidsniveau 0 werd ingesteld. Dan is er bij de instelling van de decoder in de locomotief wat mis. | Om dezelfde reden zijn ook '''geen negatieve waardes mogelijk'''. Dat zou namelijk betekenen, dat de locomotief stop, VOORDAT op de regelaar in de centrale snelheidsniveau 0 werd ingesteld. Dan is er bij de instelling van de decoder in de locomotief wat mis. | ||
| Zeile 48: | Zeile 48: | ||
=== Remcompensatie groter dan nul === | === Remcompensatie groter dan nul === | ||
Hetzelfde | Hetzelfde geldt bij de bepaling van de remcompensatie. In de regel rijdt de locomotief in eerste instantie te ver, zodat men de remdruk moet verhogen, dus '''de waarde van de remcompensatie verhoogt''', tot het klopt. | ||
Blijft de locomotief bij de bepaling van de remcompensatie te vroeg staan, dan is ofwel bij de bepaling van het snelheidsprofiel is misgelopen, of de decoder is zeer slecht ingesteld. Om bovengenoemde redenen kan de locomotief bij instellen van correcte waardes niet te vroeg tot stilstand komen. | Blijft de locomotief bij de bepaling van de remcompensatie te vroeg staan, dan is ofwel bij de bepaling van het snelheidsprofiel is misgelopen, of de decoder is zeer slecht ingesteld. Om bovengenoemde redenen kan de locomotief bij instellen van correcte waardes niet te vroeg tot stilstand komen. | ||
Aktuelle Version vom 12. November 2025, 10:09 Uhr
| Verwendung |

|
Remcompensatie
Maximale waarde voor een locomotief
Wat kan men bij remcompensatie eigenlijk als grove maximale waarde voor een locomotief ingeven?
Remcompensatie juist instellen
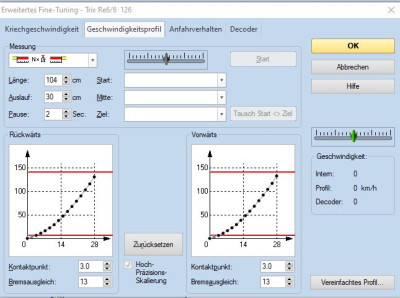
- Fig: Remcompensatie

- Michael Mertner antwoordt in Forum op de vraag:
Geen enkele. De remcompensatie is geen waarde, maar geeft een evenredigheid aan. Wat je het dichtst in de buurt zou kunnen noemen is "remdruk".
Hoge waarde slecht?
Er is een uitspraak gedaan, dat een hoge waarde "slecht" slecht zou zijn. Dat is onzin. De waarde is, zoals hij is en van de hardware inclusief locomotief afhankelijk. Hierbij zijn er geen "goede" of "slechte" waardes. Laat je niet gek maken door dergelijke uitspraken.
Locomotief blijft niet onmiddellijk staan
De waarde geeft aan, hoe de locomotief effectief "aan de regelaar" hangt.
In de regel blijft een locomotief niet onmiddellijk staan, wanneer men de regelaar van de centrale op nul instelt. De decoder heeft een remvertraging, eventueel een vliegwiel in de motor, enz. Om deze vertraging "glad te strijken", wordt een remcompensatie ingesteld. Hiermee kan TrainController dan deze meer of minder grote vertragingen berekenen en het stoppunt precies bepalen.
Als een remcompensatie van nul is ingesteld, gaat TrainController ervan uit, dat de locomotief ONMIDDELLIJK bij het instellen van nul in de centrale stopt. Dat ziet er niet alleen lelijk uit, maar levert ook risico's en ongeval gevaar op, als de locomotief stopt alsof die tegen een muur is gereden.
Remcompensatie nul
Een remcompensatie van nul is daarom eerder ongewoon. Een meer of minder grote waarde is normaal.
Hoewel ik niet uitsluit dat een waarde nul mogelijk is. Als de locomotief bij het bepalen van de remcompensatie een nul als resultaat heeft, zou dat ook kunnen werken. Dat hangt echter o.a. met de snelheid bij het bepalen van de remcompensatie en de lengte van het meettraject samen. Als de snelheid niet te hoog is en het meettraject een zekere lengte overschrijdt, dan kan het zijn dan het verlagen van de snelheidsniveaus zo geleidelijk is, dat de decoder dat volgt.
Om dezelfde reden zijn ook geen negatieve waardes mogelijk. Dat zou namelijk betekenen, dat de locomotief stop, VOORDAT op de regelaar in de centrale snelheidsniveau 0 werd ingesteld. Dan is er bij de instelling van de decoder in de locomotief wat mis.
Remcompensatie groter dan nul
Hetzelfde geldt bij de bepaling van de remcompensatie. In de regel rijdt de locomotief in eerste instantie te ver, zodat men de remdruk moet verhogen, dus de waarde van de remcompensatie verhoogt, tot het klopt.
Blijft de locomotief bij de bepaling van de remcompensatie te vroeg staan, dan is ofwel bij de bepaling van het snelheidsprofiel is misgelopen, of de decoder is zeer slecht ingesteld. Om bovengenoemde redenen kan de locomotief bij instellen van correcte waardes niet te vroeg tot stilstand komen.
Weblinks
- Bron: Forum
- Uitvoerige beschrijving van Remcompensatie - adaptief remmen: De samenhang
- Verder aanwijzigingen voor het inmeten zijn ook hier te vinden: Snelheidsprofiel maken / Lokomotieven "inmeten"
- TC-wiki: Lokomotieven inmeten: waar heb ik de remcompensatie voor nodig
- --Uslex (Diskussion) 07:30, 23. Jun. 2024 (CEST)
- bearbeitet: Uslex (Diskussion) 17:53, 22. Jan. 2025 (CET)
