Startverzögerung mit Variablen/nl: Unterschied zwischen den Versionen
Die Seite wurde neu angelegt: „Modelbouwer flanjo007 heeft deze instructies gegeven:Variable Startverzögerung.pdf (Duits).“ |
Die Seite wurde neu angelegt: „=== Startgedrag van locomotieven ===“ |
||
| Zeile 21: | Zeile 21: | ||
Modelbouwer flanjo007 heeft deze instructies gegeven:[[Special:MyLanguage/Medium:Variable Startverzögerung.pdf|Variable Startverzögerung.pdf]] (Duits). | Modelbouwer flanjo007 heeft deze instructies gegeven:[[Special:MyLanguage/Medium:Variable Startverzögerung.pdf|Variable Startverzögerung.pdf]] (Duits). | ||
< | <span id="Anfahrverhalten_von_Loks"></span> | ||
=== | === Startgedrag van locomotieven === | ||
<div lang="de" dir="ltr" class="mw-content-ltr"> | <div lang="de" dir="ltr" class="mw-content-ltr"> | ||
Version vom 20. Februar 2025, 15:47 Uhr
| Verwendung |

|
Startvertraging met variabelen
Locomotief met startvertraging
In TrainController versie 10 en hoger is het mogelijk om aan elke locomotief een eigen startvertraging toe te wijzen in de "Eigenschappen"/"Aandrijving". Hier kan een statische waarde worden ingevoerd die dan altijd geldig is.
Variabele startvertraging
Soms is het zinvoller om een variabele waarde te gebruiken die ofwel 0 (d.w.z. geen vertraging) of een vooraf gedefinieerde tijd bevat, afhankelijk van de positie. Hiervoor is een variabele nodig die kan worden aangeroepen als een locomotieffunctie en kan worden geconfigureerd volgens het doel.
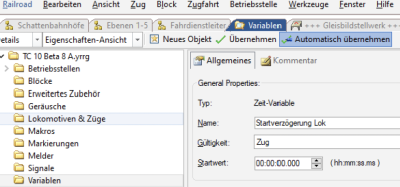
- Fig: Variabele startvertraging

Modelbouwer flanjo007 heeft deze instructies gegeven:Variable Startverzögerung.pdf (Duits).
Startgedrag van locomotieven
- Herr Freiwald gibt im Forum zum Anfahrverhalten ab TC10 weitere Hinweise:
Es ist in diesem Zusammenhang ganz wichtig, die verschiedenen Werkzeuge unterscheiden und richtig anwenden zu können.
Die Anpassung an das Anfahrverhalten dient dazu, die Ansteuerung des Anfahrens durch die Software an das tatsächliche, hardwareseitige Verhalten der Lok anzupassen.
Wenn TrainController "denkt", eine Lok führe bereits bei Fahrstufe 1 gleich los und es soll eine Lok innerhalb von 10 Sekunden auf Fahrstufe 10 beschleunigt werden, so sendet TrainController die Fahrstufen 1 bis 10 gleichmäßig im Abstand von ca. 1 Sekunde aus (Anm.: Ganz so einfach ist es nicht, es gibt bei Bedarf auch eine nichtlineare Ansteuerung. Aber für diese Betrachtung wollen wir der Einfachheit halber vom einfachen Fall ausgehen). Nach 5 Sekunden liegt Fahrstufe 5 an.
Wenn der Decoder aber so eingestellt ist, dass bei Empfang von Fahrstufe 1 die Lok erst noch 5 Sekunden stehenbleibt, weil irgendwelche Sounds im Decoder abgespielt werden, so kann es sein, dass die Lok nach Ablauf dieser 5 Sekunden einen Bocksprung macht, weil sie ja in diesem Moment Fahrstufe 5 erhält.
Dies kann mit der Anpassung an das Anfahrverhalten angepasst werden. Es geht bei dieser Anpassung nicht darum, Zeit für die Ausführung softwareseitiger Makros zu gewinnen!
Diesen Zeitgewinn kann man in TrainController Gold mit mehreren anderen Möglichkeiten erzielen. Man kann Anfahrverzögerungen in den Eigenschaften der Loks, in den Regeln von Zugfahrten und in den Einstellungen einzelner Blöcke einer Zugfahrt einstellen. Ein Diagramm, welches die zeitlichen Wirkungen dieser diversen Anfahrverzögerungen darstellt, finden Sie in der Programmbeschreibung.
Weblinks
- Quelle: Forum
- Anleitung: Variable Startverzögerung.pdf
- TC-wiki: Variablen für Anfänger
- -- flanjo007 12:04, 23. Nov. 2022 (CET)
- bearbeitet: Uslex (Diskussion) 13:06, 27. Mär. 2024 (UTC)
