Compensation de freinage adaptatif : le contexte
| Verwendung |

|
équilibrage des freins et freinage adaptatif (ABP)
Objectif et contexte du freinage adaptatif
Dans TC-Forum, le consultant TC Michael Mertner a expliqué les liens en détail :
Freinage adaptatif et Compensation de freinage sont deux choses complètement différentes, l’un construit sur l’autre, rien de plus.
La compensation de freinage est TOUJOURS utilisée (en principe), que l’on freine de manière adaptative ou non.
On ne peut que recommander à chaque utilisateur de faire un peu d’effort lors du réglage de l’équilibrage des freins et de ne pas entrer de valeurs « au-dessus du pouce » qui peuvent ou non convenir.
En résumé : 'Le système de freinage représente une valeur de rapport qui indique comment "bien" la locomotive réagit à la réduction du régime lors du freinage. Les réglages du décodeur donnent toujours un petit décalage, appelons-le simplement masse-inertie. La compensation des freins compense cette inertie, elle contrôle pour ainsi dire la pression de freinage.
Compensation de freinage
Prenons un canton avec une rampe de freinage d’un mètre et un repère d’arrêt déplacé à une distance de ce mètre. C’est un exemple classique de freinage et d’arrêt avec un seul détecteur dans le canton.
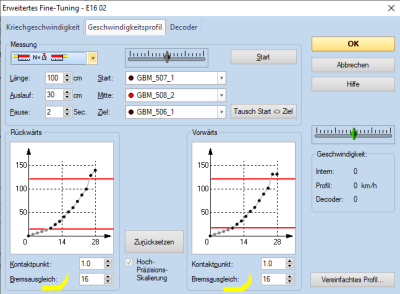
- Fig. : compensation de freinage

La locomotive arrive à 80 km/h et commence à freiner, puis s’arrête après 1,20 m. Pour compenser cela, on augmente maintenant la "pression de freinage" - c’est-à-dire la valeur de l’équilibrage du frein de quelques unités et on fait rentrer la locomotive dans ce bloc dans les mêmes conditions.
On le fait jusqu’à ce qu’il s’arrête EXACTEMENT à un mètre, puis on détermine une valeur correcte de la compensation de freinage. Attention une valeur peut ? être différente en marche arrière.
Procédure de freinage adaptatif (ABP) :
Et c’est là que la décision de Adaptive Brake Procedure (ABP) entre en jeu. Si on le fait correctement, la locomotive est maintenant introduite dans le bloc à 120 km/h. Avec un profil de vitesse soigneusement mesuré, un bon système numérique et des conditions extérieures constantes (température, état du rail, intensité électrique, etc.), la locomotive devrait s’arrêter exactement au bout d’un mètre même à une vitesse plus élevée. Elle freine débute son freinage plus tôt.
Il est probable qu’elle ne touche pas le mètre avec précision, mais si vous la conduisez trop loin, vous augmentez un peu la compensation des freins. Elle s’arrête alors un peu plus tôt à 80 km/h, mais un peu plus tôt à 120 km/h. Plus la vitesse est élevée, plus l’effet de la valeur sur la compensation des freins est généralement important. La mesure des points de contact aussi est importante pour la précision d'arrêt.
C’est ce que l’on appelle alors la détermination de la moyenne, donc un comportement acceptable aux deux vitesses.Si vous n’arrivez pas à le faire, vous pouvez maintenant essayer via les réglages du décodeur (décélération du frein, éventuellement tableau des vitesses) améliorer le comportement. Et aussi dans l'onglet Général on peut ajuster l'Accélération et la Décélération.
N’oubliez pas : lorsque vous tâtonnez sur les paramètres de vitesse du décodeur, il faut le mesurer à nouveau. Pas lors de la modification de la décélération du frein; dans ce cas, il suffit de réajuster la compensation des freins.
Maintenant, on augmente encore la vitesse et on prolonge la rampe de freinage et la distance d’un mètre à 1,50 mètre ou même deux mètres et on les fait rouler à 80 km/h puis à 120 km/h. Elle devrait maintenant s’arrêter exactement deux mètres après avoir atteint les deux vitesses.
Sans modifier la valeur de l’équilibrage des freins. Dans l’idéal, la locomotive s’arrête au point d’arrêt donné avec la même valeur de compensation des freins dans les quatre situations.
Je vous le dis tout de suite, ce sera un défi. J’ai pris la peine de régler une locomotive pour qu’elle s’arrête toujours au bon endroit à partir de différentes vitesses, avec des rampes et des distances différentes.
- Conclusion : ma durée de vie restante n’est pas suffisante pour régler toutes les locomotives de cette façon.
Compromis
Maintenant, on a le choix : soit on fait des compromis et on prend de petites inexactitudes dans les réglages, où "petit" doit être défini par chacun...
- ou on règle dans TOUS les blocs les mêmes paramètres pour la distance et la rampe de freinage - ce qui souvent ne fonctionne pas...
- ou on utilise un véritable détecteur d’arrêt, c’est-à-dire un "vrai" détecteur de retour pour arrêter...
- ou - c’est le moment - on utilise le freinage adaptatif' (ABP). Ici, les locomotives sont immobilisées avec les valeurs de l’équilibrage des freins - qui a été déterminé avec soin
Le freinage adaptatif repose donc sur la compensation des freins. Si la compensation des freins est réglée de manière incorrecte, le freinage adaptatif échoue également.
Peut-être encore en marge : très rarement, la valeur de l’équilibrage du frein est nulle. Cela signifierait que la locomotive est en fait EXACTEMENT au moment où le niveau zéro est envoyé, ce qui arrive très rarement. Les systèmes ultra-rapides aiment avoir des valeurs à un chiffre, ce qui est déjà respectable. C’est encore bizarre, mais cela se produit lorsque le retard de freinage du décodeur est réglé sur un niveau relativement élevé.
Il ne s’agit pas d’une évaluation des systèmes numériques, mais seulement d’une caractéristique, ce qui est très important.
C’est exactement la raison pour laquelle il n’y a pas de valeurs négatives pour la compensation des freins. Cela signifierait que le conducteur du train aurait également un « instrument à boule de cristal » dans la cabine du conducteur, car la locomotive s’arrêterait alors AVANT que la vitesse zéro ne soit envoyée.
Les locomotives roulent TOUJOURS trop loin pour déterminer l’équilibrage des freins, elles ne s’arrêtent jamais avant la distance. Si cela arrive, c'est que le profil de vitesse n’est pas correct.
Mode d’action de l’ABP
Monsieur Freiwald donne dans ce Beitrag des informations détaillées sur le mode d’action de l’ABP :
ABP améliore la précision des points d’arrêt calculés. ABP ralentit un train qui doit tenir dans un canton avec des valeurs individuelles pour les vitesses et les rampes de freinage. Ces valeurs sont ajustées individuellement au train et permettent ainsi d’obtenir un arrêt aussi précis que possible à la position souhaitée.
Avec une locomotive avec une compensation de frein réglée de manière optimale, vous ne remarquerez pratiquement aucun effet de l’ABP.
Avec une locomotive ayant une compensation de frein plutôt mal ajustée, vous remarquerez assez clairement l’effet de l’ABP. La locomotive réduit sensiblement sa vitesse avant un canton avec un arrêt de train. Cependant, la précision d’arrêt est généralement également considérablement améliorée.
Règle générale: Plus l’effet de l’ABP est clairement perceptible, plus la compensation des freins est mal ajustée
Locomotive mal calibrée
Monsieur Freiwald fait encore une remarque à ce sujet dans [1] :
Si l’ABP entraîne une modification significative du comportement de conduite avant l’entrée dans un canton, soit les réglages du canton ne sont pas corrects, soit la locomotive en question n’a pas été correctement calibrée (mot-clé compensation des freins).
Dans ce cas, ABP fournit donc indirectement un avertissement à ce sujet. La désactivation de ABP n’élimine pas la cause, mais seulement les symptômes du problème.
Détecteur d’arrêt réel
Question 1: Dans un canton qui a un vrai champ de freinage mais un marquage de freinage déplacé, la compensation du frein d’une locomotive est-elle efficace, même si elle n’est pas optimale ?
Réponse 1: Comme décrit, la compensation de freinage est TOUJOURS active ! Mais pas réglée de manière optimale. On peut considérer la compensation des freins comme le paramètre le plus important du profil de locomotive.
Freins sans ABP
Question 2: La compensation des freins est-elle également efficace lorsque le freinage adaptatif est désactivé ?
Réponse 2: Oui, la compensation des freins est TOUJOURS active et le freinage adaptatif détermine comment elle est gérée.
entrée à 80 km/h
(du même Thread dans le forum TC, la réponse provient également de Michael Mertner) :
Dans certains cantons, je roule à 50 ou 60 km/h, dans les cantons de gare à 80 km/h et dans les cantons "les plus rapides" 200 km/h sont autorisés. Les cantons de 50, 60 et 80 km/h n’ont qu’un seul détecteur, dans le reste il y a des signaux d’arrêt réels. Dois-je maintenant utiliser une vitesse moyenne de 125 km/h pour la compensation des freins ou me concentrer avec 65 km/h (avec une rampe de 35 cm) sur les blocs dont le repère d’arrêt est décalé ?
Réponse: Commencez simplement par faire rouler la locomotive dans le canton à 80 km/h, puis regardez-la s’arrêter.
Freinage excessif
Notre opinion personnelle, cependant, est que, indépendamment du fait que freiner de 65 km/h à zéro à moins de 35 cm est assez sportif. Avec le chemin de fer réel, cela représenterait une distance de freinage d’environ 30 mètres, c’est-à-dire même pas deux longueurs de locomotive.
À 65 km/h, aucun véhicule sur rails ne peut le faire. Même avec une forte décélération de 2,6 m/s nous aurions toujours une distance de freinage de 50 mètres. Il n’y a pas grand-chose à faire, et un train de quelques dizaines de tonnes ne peut absolument pas le faire en raison de la physique.
Bien sûr, cela ne vaut pas pour le train miniature. Des valeurs de décélération farfelues de 25 m/s ne poseraient aucun problème.
- Imaginez qu’un "vrai" TGV:
- de 80 km/h à 0
- une distance de freinage de 9 mètres.
Soit environ 25 m/s ou ' (g), un peu plus de 2,5 fois l’accélération de la gravité. Ça ne semble pas grand chose, mais je monterai quand même pas dans ce train...
Mais un chemin de fer miniature peut faire cela... Certaines locomotives s’arrêtent à moins d’un centimètre d’une vitesse décente.
Le cas échéant, cela ne doit être fait que dans des zones cachées.
Bon, c’est mon avis...
freinages normaux
Ainsi, la locomotive se déplace d’abord à 50 km/h dans le canton et la compensation de freinage doit ensuite être réglée de manière à ce qu’elle soit maintenue après 35 cm.
Ensuite, on fait entrer la locomotive dans le canton à 60 km/h et on l’envoie un peu plus loin, puis on augmente de 1 à 2 points la compensation des freins. La différence ne devrait pas être trop grande. Si elle freine maintenant, elle pourrait être un centimètre plus tôt à 60 km/h et un demi-centimètre plus tôt à 50 km/h. Il n’y a pas de valeurs universelles, ce qui est très différent pour chaque véhicule.
Recommencez à 80 km/h, arrêtez-la trop tôt, puis diminuez le freinage et regardez comment elle va à 50 ou. 60 km/h de freinage, ce qui est idéal, c’est qu’elle s’arrête au même point à partir des trois vitesses. Les points ci-dessus sont à nouveau d’actualité:
- Accepter de petits flous ou
- Ajuster les paramètres du décodeur ou
- Utiliser le freinage adaptatif.
Freinage adaptatif
Avec le freinage adaptatif, la compensation du frein est déterminée dans le cas ci-dessus à 50 km/h, c’est-à-dire à la vitesse la plus lente. Il devrait aussi convenir.
Si la locomotive roule maintenant en mode de freinage adaptatif, elle sera ralentie à un moment donné dans l’avant-bloc jusqu’à 50 km/h. Il est intentionnellement : NON documenté où la locomotive freine, ce qui peut être sur le marquage de freinage du bloc moteur, mais n’est pas obligatoire.
Dans tous les cas, le freinage adaptatif garantit que la locomotive est freinée avec l’équilibrage des freins utilisé EN DERNIER. L’avantage est que la locomotive freine avec des paramètres connus, l’inconvénient étant qu’elle ralentit un peu plus tôt. Je ne le ferais qu’avec des véhicules vraiment réticents ;-). D’autre part, il n’y a pratiquement plus aucune indication dans le forum que la locomotive s’arrête mal malgré un freinage adaptatif. Déjà remarquable, n’est-ce pas ? L’approche du développeur est ici reconnaissable et fructueuse ;-)
La façon de le mettre en œuvre dépend du goût de l’utilisateur. L’un veut freiner de manière dynamique et flexible, l’autre s’en moque, l’essentiel étant que les locomotives soient au bon endroit à la fin. La première solution est complexe, la seconde est plus rapide c'est à chacun de décider.
Liens Web
- Source : Forum
- ABP : Forum
- Informations générales : Compensation des freins et ABP
- --Digi thomas2003 (Diskussion) 09:42, 14. Okt. 2020 (CEST)
- bearbeitet: Uslex (Diskussion) 10:30, 14. Mai 2022 (CEST), Uslex (Diskussion) 14:22, 6. Dez. 2025 (UTC)
