Decoder remvertraging
| Verwendung |

|
Startversnelling en remvertraging van een decoder
Dit hoofdstuk beschrijft hoe je de startversnelling en remvertraging van een decoder kunt instellen en welk effect deze instelling heeft op het rijgedrag van de locomotief.
Rijgedrag van een locomotief
Het rijgedrag van een locomotief wordt bepaald door de hoeveelheid spanning die aan de motor wordt geleverd in de afzonderlijke snelheidsstappen, naast de goede motor en overdracht. Decoder: Instellen minimum- en maximumsnelheid
Helaas zijn deze instellingen voor de verschillende digitale protocollen en decoders soms anders geconfigureerd van fabrikant tot fabrikant.
Daarom moet je de beschrijving van de decoder goed lezen voordat je de instellingen wijzigt.
Maar maak je geen zorgen, voor zover ik weet hebben alle nieuwere decoders een reset-optie die de decoder terugzet naar de fabrieksinstellingen. Raadpleeg de handleiding van de decoder voor meer informatie.
Decoder volgens NMRA
Dit geldt voor bijna alle DCC-decoders.
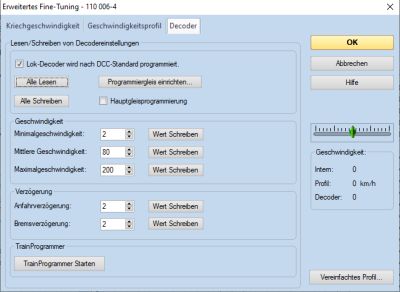
- Fig: Uitgebreide fijnafstemming

Als de minimum- en maximumsnelheid correct zijn ingesteld, kun je het rijgedrag nog verder aanpassen door de optrekvertraging en de remvertraging in te stellen. Met NMRA-compatibele decoders kunnen deze instellingen worden gemaakt via CV's 3 en 4.
Eenvoudig gezegd kun je zeggen:
- De 'waarde in CV 3 bepaalt hoe snel de locomotief accelereert
- De 'waarde in CV 4 bepaalt hoe snel de locomotief remt.
De standaardwaarden voor ESU Lokpilot decoders zijn ingesteld op 8 en 6.
De standaardwaarden voor Lenz-decoders zijn ingesteld op 6 en 5.
Over het algemeen is het gebruikelijk om de remvertraging in CV 4 iets lager in te stellen, zodat je de regelaar in geval van nood gewoon op 0 kunt zetten en er geen ongelukken gebeuren.
Decoder opstartvertraging
Sommige decoderfabrikanten verwijzen ook naar deze waarde als versnellingsvertraging.
Als we een locomotief die op het perron staat met snelheidsniveau 0 de opdracht geven om te gaan rijden met snelheidsniveau 28, dan doet hij dit meestal niet abrupt, maar regelt min of meer langzaam omhoog en accelereert gelijkmatig.
De waarde in CV 3 bepaalt hoe lang de decoder moet wachten voordat hij naar het volgende snelheidsniveau mag verhogen. De decoder verhoogt dan het snelheidsniveau tot de gewenste doelsnelheid is bereikt.
Hoe hoger de waarde in CV 3, hoe langzamer de locomotief accelereert. Maar dit betekent ook dat je geen truc kunt gebruiken om de locomotief sneller te laten accelereren dan hier is ingesteld. Natuurlijk kun je de acceleratievertraging op een kleinere waarde instellen.
ESU geeft een indicatie van de waarde: De waarde in CV 3 vermenigvuldigd met 0,869 geeft de tijd van stilstand tot maximale snelheid. Met een ESU-standaardwaarde van 8 resulteert dit in een tijd van ongeveer 7 seconden tot de maximumsnelheid.
Dit cijfer geldt echter alleen voor ESU, andere fabrikanten hebben een andere meetlat.
Decoder remvertraging
Sommige decoderfabrikanten noemen deze waarde ook traagheid.
De waarde in CV 4 bepaalt hoe lang de decoder moet wachten voordat hij bij het remmen mag terugschakelen naar het volgende snelheidsniveau.
Hoe hoger de waarde in CV 4, hoe langer de remweg tot de locomotief kan stoppen.
Als deze waarde te hoog is ingesteld, kan het heel snel gebeuren dat de locomotief niet op tijd stopt aan het einde van het spoor omdat de remweg is onderschat.
ESU geeft een hint voor de waarde: De waarde in CV 4 vermenigvuldigd met 0,869 geeft de tijd van maximale snelheid tot stilstand. Met een ESU-standaardwaarde van 6 resulteert dit in een tijd van ongeveer 4,8 seconden tot stilstand. Dit cijfer geldt echter alleen voor ESU, andere fabrikanten hebben een andere meetlat.
De versnelling en remvertraging uitschakelen
De meeste decoders zijn zo geprogrammeerd dat de vertragingen kunnen worden uitgeschakeld met een locomotieffunctie.
Zowel ESU- als Lenz-decoders gebruiken standaard de F4-functie. Als de F4-locomotieffunctie wordt geactiveerd, schakelt de decoder zonder te wachten direct omhoog of omlaag naar het gewenste snelheidsniveau. Dit wordt gebruikt door de computer of ook door de centrale, bijvoorbeeld bij een noodstop.
Dan wordt:
- eerst het commando om de remvertraging uit te schakelen naar alle voertuigen gestuurd
- en vervolgens het commando om onmiddellijk te stoppen.
Welke waarde instellen?
Als je je modelspoorbaan voornamelijk handmatig met de handcontroller laat rijden, is de optrek- en afremvertraging prima om schokkerige besturing te voorkomen en treinen soepel te laten rijden.
Maar als je je treinen met een computer bestuurt, biedt modelspoorbesturing betere mogelijkheden om dit te bereiken.
Hier moeten relatief lage vertragingen worden ingesteld. Hier zijn twee redenen voor:
- De computer kan de snelheid veel flexibeler regelen dan de starre decoderinstelling toestaat
- Lange, langzame remhellingen op de vrije baan
- Steile, snellere remhellingen op korte zijsporen in het station
Voorbij rijden van stopmarkeringen
Te grote vertragingen zorgen ervoor dat de computer remhellingen en stoppunten niet nauwkeurig kan berekenen. Dit leidt dan tot voorbij rijden van de stopmarkeringen.
In de meeste gevallen zijn de vooraf ingestelde waarden ontworpen voor handmatig rijden. Voor computerbesturing moeten de waarden iets lager worden ingesteld.
Nul vertragingen
Veel specialisten raden aan om de vertragingen op 0 of 1 te zetten. Dit heeft echter een groot nadeel. Sommige decoders gebruiken intern altijd 128 rijstappen, zelfs als er maar 28 rijstappen kunnen worden aangesproken. Deze tussenliggende rijstappen worden samen met de optrek-/remvertraging gebruikt om zonder schokken van de ene decodersnelheidsstap naar de volgende te schakelen.
Als de vertragingen op 0 of, bij sommige decoders, op 1 worden gezet, worden de tussenliggende snelheidsstappen ook uitgeschakeld en kan er een kleine schok optreden bij elke snelheidsverandering.
- Advies: kies de laagste waarde voor de vertraging waarbij de tussenliggende snelheidsstappen niet worden uitgeschakeld. Welke waarde dit is, moet je opzoeken in de handleiding van je decoder. Als je dit niet hebt, gebruik dan voor de zekerheid de waarde 2 of probeer uit hoe de decoder die je gebruikt zich gedraagt.
Voordelen van de decodervertragingen
- Vertragingen die zijn ingesteld via CV 3/4 zijn ook effectief wanneer de trein wordt bestuurd via een handmatige besturing
- De vertragingen zorgen voor soepel optrekken en afremmen.
Nadelen van de decodervertragingen
- De vertragingen belemmeren de exacte berekening van remhellingen en stoppunten
- Vertragingen kunnen ertoe leiden dat stoppunten worden voorbijgereden
- De computer heeft moeite met het compenseren en uitbalanceren van verschillend rijgedrag van verschillende locomotieven.
Locomotieven met geluid
Bij locomotieven met geluid wordt de opstartvertraging meestal relatief hoog ingesteld, omdat de langzame snelheidsverhoging samen met het gesynchroniseerde geluid zorgt voor de echte locomotiefervaring.
Weblinks
- TC-wiki: Locomotieven kalibreren: Waar heb ik de remcompensatie voor nodig??
- TC-wiki: Decoder: Instellen van de minimum- en maximumsnelheid
- --DieterN 10:38, 28. Jan. 2010 (UTC)
- bearbeitet: Wohlmannstetter 19:24, 29. Apr. 2010 (UTC), Wohlmannstetter 16:55, 7. Mär. 2021 (CET), Uslex (Diskussion) 06:37, 18. Dez. 2025 (UTC)
