Decoder Bremsverzögerung: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
Uslex (Diskussion | Beiträge) K 11 |
||
| (24 dazwischenliegende Versionen von 4 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
<languages/> | |||
{{TC7891011gs}} | |||
__NOTOC__ | |||
<translate> | |||
== | == Anfahrbeschleunigung und die Bremsverzögerung eines Decoders == <!--T:1--> | ||
<!--T:2--> | |||
Hier wird beschrieben, wie man die Anfahrbeschleunigung und die Bremsverzögerung eines Decoders einstellt und welche Auswirkung diese Einstellung auf das Fahrverhalten der Lokomotive hat. | |||
=== Fahrverhalten einer Lok === <!--T:3--> | |||
<!--T:4--> | |||
Das Fahrverhalten einer Lok wird neben dem guten Motor und Getriebe, dadurch bestimmt, wieviel Spannung dem Motor in den einzelnen Fahrstufen zugeführt wird. '''[[Special:MyLanguage/Decoder Geschwindigkeitsprofil|Decoder: Einstellen von Minimal- und Höchstgeschwindigkeit]]''' | |||
Wenn die Minimal und Höchstgeschwindigkeit korrekt eingestellt sind, kann man das Fahrverhalten noch weiter anpassen, indem man die Anfahrverzögerung und die Bremsverzögerung einstellt. Bei den NMRA kompatiblen | <!--T:5--> | ||
Leider werden diese Einstellungen für die verschiedenen digitalen Protokolle und Decoder teilweise von Hersteller zu Hersteller '''verschieden konfiguriert'''. | |||
<!--T:6--> | |||
Man muss daher sehr sorgfältig die Decoderbeschreibung lesen bevor man an den Einstellungen dreht. | |||
<!--T:7--> | |||
Aber keine Sorge, soweit ich weiss haben alle neueren Decoder eine Reset Möglichkeit, die den verstellten Decoder wieder in den Auslieferungszustand versetzt. Dazu bitte das Decoderhandbuch befragen. | |||
=== Decoder nach NMRA === <!--T:8--> | |||
<!--T:9--> | |||
Hierzu zählen fast alle DCC-Decoder. | |||
</translate> | |||
:[[Datei:ErweitertesFinetuning.PNG|400px]] | |||
:<translate> | |||
<!--T:10--> | |||
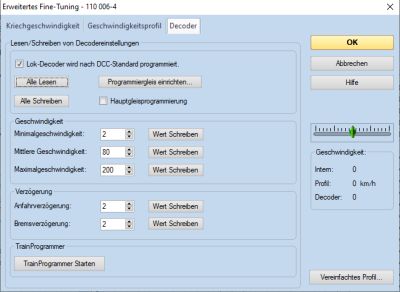
''Abb: Erweitertes Finetuning'' | |||
<!--T:11--> | |||
Wenn die Minimal und Höchstgeschwindigkeit korrekt eingestellt sind, kann man das Fahrverhalten noch weiter anpassen, indem man die Anfahrverzögerung und die Bremsverzögerung einstellt. Bei den NMRA kompatiblen Decodern können diese Einstellungen über die CVs 3 und 4 gemacht werden. | |||
<!--T:12--> | |||
Vereinfacht kann man sagen: | Vereinfacht kann man sagen: | ||
* Der Wert in CV 3 bestimmt wie schnell die Lok beschleunigt. | * Der '''Wert in CV 3''' bestimmt wie schnell die Lok beschleunigt. | ||
* Der Wert in CV 4 bestimmt wie schnell die Lok abbremst. | * Der '''Wert in CV 4''' bestimmt wie schnell die Lok abbremst. | ||
Bei ESU Lokpilot | <!--T:13--> | ||
Bei Lenz | Bei ESU Lokpilot Decodern sind die Defaultwerte auf 8 und 6 voreingestellt. | ||
<!--T:14--> | |||
Bei Lenz Decodern sind die Defaultwerte auf 6 und 5 voreingestellt. | |||
<!--T:15--> | |||
Dabei ist generell üblich, die Bremsverzögerung in CV 4 etwas kleiner einzustellen, damit man im Notfall einfach den Regler auf 0 drehen kann, und kein Unfall passiert. | Dabei ist generell üblich, die Bremsverzögerung in CV 4 etwas kleiner einzustellen, damit man im Notfall einfach den Regler auf 0 drehen kann, und kein Unfall passiert. | ||
=== | === Decoder Anfahrverzögerung === <!--T:16--> | ||
Manche | |||
Wenn wir einer Lok die mit Fahrstufe 0 am Bahnsteig steht, den Befehl geben mit Fahrstufe 28 loszufahren, macht sie das gewöhnlich nicht ruckartig, sondern sie regelt mehr oder weniger langsam hoch und beschleunigt gleichmässig. | <!--T:17--> | ||
Manche Decoderhersteller bezeichnen diesen Wert auch als Beschleunigungsträgheit. | |||
<!--T:18--> | |||
Wenn wir einer Lok die mit Fahrstufe 0 am Bahnsteig steht, den Befehl geben mit Fahrstufe 28 loszufahren, macht sie das gewöhnlich nicht ruckartig, sondern sie '''regelt mehr oder weniger langsam hoch''' und beschleunigt gleichmässig. | |||
Der Wert in CV 3 bestimmt, wie lange der | <!--T:19--> | ||
Der | Der Wert in CV 3 bestimmt, wie lange der Decoder warten muss, bis er in die nächste Fahrstufe hochregeln darf. | ||
Der Decoder regelt dann so lange hoch, bis die gewünschte Zielgeschwindigkeit erreicht ist. | |||
<!--T:20--> | |||
Je grösser der Wert in CV 3 ist, desto langsamer beschleunigt die Lok. Aber das bedeutet auch, dass man die Lok unter mit keinem Trick schneller beschleunigen kann als hier eingestellt. Natürlich kann man die Anfahrverzögerung wieder auf einen kleineren Wert programmieren. | Je grösser der Wert in CV 3 ist, desto langsamer beschleunigt die Lok. Aber das bedeutet auch, dass man die Lok unter mit keinem Trick schneller beschleunigen kann als hier eingestellt. Natürlich kann man die Anfahrverzögerung wieder auf einen kleineren Wert programmieren. | ||
ESU gibt als Hinweis für den Wert an: Der Wert in CV 3 multipliziert mit 0.869 ergibt die Zeit vom Stillstand bis zur Maximalgeschwindigkeit. Bei einem ESU Default-Wert von 8, ergibt sich eine Zeit von etwa | <!--T:21--> | ||
ESU gibt als Hinweis für den Wert an: Der Wert in CV 3 multipliziert mit 0.869 ergibt die Zeit vom Stillstand bis zur Maximalgeschwindigkeit. Bei einem ESU Default-Wert von 8, ergibt sich eine Zeit von etwa 7 Sekunden bis zur Höchstgeschwindigkeit. | |||
<!--T:22--> | |||
Diese Zahl gilt aber nur bei ESU, andere Herstelle haben eine andere Messlatte. | Diese Zahl gilt aber nur bei ESU, andere Herstelle haben eine andere Messlatte. | ||
=== | === Decoder Bremsverzögerung === <!--T:23--> | ||
<!--T:24--> | |||
Manche Decoderhersteller bezeichnen diesen Wert auch als Trägheit. | |||
<!--T:25--> | |||
Der Wert in CV 4 bestimmt, wie lange der Decoder warten muss, bis er beim Abbremsen auf die nächste Fahrstufe runterregeln darf. | |||
<!--T:26--> | |||
Je grösser der Wert in CV 4 ist, desto länger wird der Bremsweg bis die Lok halten kann. | Je grösser der Wert in CV 4 ist, desto länger wird der Bremsweg bis die Lok halten kann. | ||
<!--T:27--> | |||
Wählt man diesen Wert zu gross, dann passiert es sehr schnell, das man die Lok am Gleisende nicht rechtzeitig zum stehen bekommt, weil man den Bremsweg unterschätzt hat. | Wählt man diesen Wert zu gross, dann passiert es sehr schnell, das man die Lok am Gleisende nicht rechtzeitig zum stehen bekommt, weil man den Bremsweg unterschätzt hat. | ||
ESU gibt als Hinweis für den Wert an: Der Wert in CV 4 multipliziert mit 0.869 ergibt die Zeit von Höchstgeschwindikeit bis zum Stillstand. Bei einem ESU Default-Wert von 6, ergibt sich eine Zeit von etwa | <!--T:28--> | ||
ESU gibt als Hinweis für den Wert an: Der Wert in CV 4 multipliziert mit 0.869 ergibt die Zeit von Höchstgeschwindikeit bis zum Stillstand. Bei einem ESU Default-Wert von 6, ergibt sich eine Zeit von etwa 4,8 Sekunden bis zum Stillstand. Diese Zahl gilt aber nur bei ESU, andere Hersteller haben eine andere Messlatte. | |||
=== Abschalten der Beschleunigungs- und Bremsverzögerung === <!--T:29--> | |||
<!--T:30--> | |||
Die meisten Decoder sind so programmiert, dass die Verzögerungen per Lokfunktion ausgeschaltet werden können. | |||
<!--T:31--> | |||
Sowohl ESU als auch Lenz Decoder verwenden dazu standardmässig die Funktion F4. Ist die Lokfunktion F4 aktiviert, dann schaltet der Decoder ohne Wartezeit direkt in die gewünschte Fahrstufe rauf oder runter. Dies wird vom Computer oder auch von der Zentrale zum Beispiel bei einem Nothalt verwendet. | |||
<!--T:32--> | |||
Dann wird: | |||
*zuerst an alle Fahrzeuge der Befehl zum Ausschalten der Bremsverzögerung gesendet | |||
*und dann der Befehl zum sofortigen Halt. | |||
=== | === Welchen Wert einstellen? === <!--T:33--> | ||
<!--T:34--> | |||
Fährt man seine Modellbahn überwiegend manuell mit dem Handregler ist die Anfahr- und Bremsverszögerung eine feine Sache, um ruckartige Steuerungen zu vermeiden und Züge weich fahren zu lassen. | Fährt man seine Modellbahn überwiegend '''manuell mit dem Handregler''' ist die Anfahr- und Bremsverszögerung eine feine Sache, um ruckartige Steuerungen zu vermeiden und Züge weich fahren zu lassen. | ||
<!--T:35--> | |||
Steuert man seine Züge aber mit dem Computer, so bietet die Modellbahnsteuerung bessere Möglichkeiten dieses zu erreichen. | Steuert man seine Züge aber mit dem Computer, so bietet die Modellbahnsteuerung bessere Möglichkeiten dieses zu erreichen. | ||
<!--T:36--> | |||
Hier sollte man relativ niedrige Verzögerungen einstellen. Dies hat zwei Gründe: | Hier sollte man relativ niedrige Verzögerungen einstellen. Dies hat zwei Gründe: | ||
* Der Computer kann die Geschwindigkeit wesentlich flexibler regeln als die starre | * Der Computer kann die Geschwindigkeit wesentlich flexibler regeln als die starre Decodereinstellung erlaubt. | ||
* lange langsame Bremsrampen auf freier Strecke | |||
* steile schnellere Bremsrampen in kurzen Nebengleisen im Bahnhof | |||
=== Überfahren der Haltepunkte === <!--T:37--> | |||
<!--T:38--> | |||
Zu grosse Verzögerungen behindern den Computer bei der exakten Berechnung von Bremsrampen und Haltepunkten. Dies führt dann zum '''Überfahren der Haltepunkte'''. | |||
<!--T:39--> | |||
In den meisten Fällen sind die voreingestellten Werte '''für das manuelle Fahren ausgelegt'''. Für die Computersteuerung sollte man die Werte '''etwas niedriger''' einstellen. | |||
=== Verzögerungen Null === <!--T:40--> | |||
<!--T:41--> | |||
===Vorteile der Decoder Verzögerungen=== | Viele Spezialisten empfehlen die '''Verzögerungen auf 0 oder 1''' zu setzen. Dies hat aber einen gravierenden Nachteil. Einige Decoder nutzen intern immer 128 Fahrstufen, auch wenn man nur 28 Fahrstufen ansprechen kann. Diese zwischenfahrstufen werden mit der Anfahr-/Bremsverzögerung benutzt um ohne ruckeln von einer auf die nächste Decoderfahrstufe hoch-/runter zu schalten. | ||
<!--T:42--> | |||
Werden die Verzögerungen auf 0 oder bei einigen Decodern auf 1 gesetzt, dann werden auch die Zwischenfahrstufen abgeschaltet und es kann bei jedem Geschwindigkeitwechsel ein kleiner Ruck entstehen. | |||
* Empfehlung: man wählt den niedrigsten Wert, bei der Verzögerung, der die Zwischenfahrstufen nicht abschaltet. Welcher Wert das ist, muss man im Handbuch seines Decoders nachschauen. Wenn man dies nicht hat, so nimmt man sicherheitshalber den Wert 2 oder man probiert eben aus, wie sich der verwendete Decoder verhält. | |||
=== Vorteile der Decoder Verzögerungen === <!--T:43--> | |||
<!--T:44--> | |||
* Über CV 3/4 eingestellte Verzögerungen wirken auch, wenn man den Zug über einen Handregeler fährt. | * Über CV 3/4 eingestellte Verzögerungen wirken auch, wenn man den Zug über einen Handregeler fährt. | ||
* Die Verzögerungen bewirken ein ruckfreies Beschleunigen und Bremsen. | * Die Verzögerungen bewirken ein ruckfreies Beschleunigen und Bremsen. | ||
===Nachteile der Decoder Verzögerungen=== | |||
=== Nachteile der Decoder Verzögerungen === <!--T:45--> | |||
<!--T:46--> | |||
* Die Verzögerungen behindern das exakte Berechnen von Bremsrampen und Haltepunkten | * Die Verzögerungen behindern das exakte Berechnen von Bremsrampen und Haltepunkten | ||
* Verzögerungen können zum Überfahren von Haltepunkten führen. | * Verzögerungen können zum Überfahren von Haltepunkten führen. | ||
* Der Computer kann unterschiedliche Fahrverhalten verschiedenere Loks nur schlecht kompensieren und ausgleichen. | * Der Computer kann unterschiedliche Fahrverhalten verschiedenere Loks nur schlecht kompensieren und ausgleichen. | ||
== | === Soundlokomotiven === <!--T:47--> | ||
<!--T:48--> | |||
Bei Soundlokomotiven ist die '''Anfahrverzögerung''' meist relativ hoch eingestellt, weil gerade das langsame Hochregeln der Geschwindigkeit zusammen mit einem synchronisierten Sound erst das wahre Lok-Erlebnis ausmacht. | |||
== Weblinks == <!--T:49--> | |||
<!--T:50--> | |||
*TC-wiki: [[Special:MyLanguage/Loks einmessen: Wofür brauche ich den Bremsausgleich?|Loks einmessen: Wofür brauche ich den Bremsausgleich?]] | |||
*TC-wiki: [[Special:MyLanguage/Decoder Geschwindigkeitsprofil|Decoder: Einstellen von Minimal- und Höchstgeschwindigkeit]] | |||
</translate> | |||
[[ | :--[[Special:MyLanguage/Benutzer:DieterN|DieterN]] 10:38, 28. Jan. 2010 (UTC) | ||
:bearbeitet: [[Special:MyLanguage/Benutzer:Wohlmannstetter|Wohlmannstetter]] 19:24, 29. Apr. 2010 (UTC), [[Special:MyLanguage/Benutzer:Wohlmannstetter|Wohlmannstetter]] 16:55, 7. Mär. 2021 (CET), [[Benutzer:Uslex|Uslex]] ([[Benutzer Diskussion:Uslex|Diskussion]]) 06:37, 18. Dez. 2025 (UTC) | |||
[[ | [[Kategorie: Hardware{{#translation:}}]] | ||
[[Kategorie: Lok{{#translation:}}]] | |||
[[Kategorie: Decoder{{#translation:}}]] | |||
[[Kategorie: DCC{{#translation:}}]] | |||
[[Kategorie: Bremsverzögerung{{#translation:}}]] | |||
[[Kategorie: Fahrstufen{{#translation:}}]] | |||
Aktuelle Version vom 18. Dezember 2025, 08:37 Uhr
| Verwendung |

|
Anfahrbeschleunigung und die Bremsverzögerung eines Decoders
Hier wird beschrieben, wie man die Anfahrbeschleunigung und die Bremsverzögerung eines Decoders einstellt und welche Auswirkung diese Einstellung auf das Fahrverhalten der Lokomotive hat.
Fahrverhalten einer Lok
Das Fahrverhalten einer Lok wird neben dem guten Motor und Getriebe, dadurch bestimmt, wieviel Spannung dem Motor in den einzelnen Fahrstufen zugeführt wird. Decoder: Einstellen von Minimal- und Höchstgeschwindigkeit
Leider werden diese Einstellungen für die verschiedenen digitalen Protokolle und Decoder teilweise von Hersteller zu Hersteller verschieden konfiguriert.
Man muss daher sehr sorgfältig die Decoderbeschreibung lesen bevor man an den Einstellungen dreht.
Aber keine Sorge, soweit ich weiss haben alle neueren Decoder eine Reset Möglichkeit, die den verstellten Decoder wieder in den Auslieferungszustand versetzt. Dazu bitte das Decoderhandbuch befragen.
Decoder nach NMRA
Hierzu zählen fast alle DCC-Decoder.
- Abb: Erweitertes Finetuning

Wenn die Minimal und Höchstgeschwindigkeit korrekt eingestellt sind, kann man das Fahrverhalten noch weiter anpassen, indem man die Anfahrverzögerung und die Bremsverzögerung einstellt. Bei den NMRA kompatiblen Decodern können diese Einstellungen über die CVs 3 und 4 gemacht werden.
Vereinfacht kann man sagen:
- Der Wert in CV 3 bestimmt wie schnell die Lok beschleunigt.
- Der Wert in CV 4 bestimmt wie schnell die Lok abbremst.
Bei ESU Lokpilot Decodern sind die Defaultwerte auf 8 und 6 voreingestellt.
Bei Lenz Decodern sind die Defaultwerte auf 6 und 5 voreingestellt.
Dabei ist generell üblich, die Bremsverzögerung in CV 4 etwas kleiner einzustellen, damit man im Notfall einfach den Regler auf 0 drehen kann, und kein Unfall passiert.
Decoder Anfahrverzögerung
Manche Decoderhersteller bezeichnen diesen Wert auch als Beschleunigungsträgheit.
Wenn wir einer Lok die mit Fahrstufe 0 am Bahnsteig steht, den Befehl geben mit Fahrstufe 28 loszufahren, macht sie das gewöhnlich nicht ruckartig, sondern sie regelt mehr oder weniger langsam hoch und beschleunigt gleichmässig.
Der Wert in CV 3 bestimmt, wie lange der Decoder warten muss, bis er in die nächste Fahrstufe hochregeln darf. Der Decoder regelt dann so lange hoch, bis die gewünschte Zielgeschwindigkeit erreicht ist.
Je grösser der Wert in CV 3 ist, desto langsamer beschleunigt die Lok. Aber das bedeutet auch, dass man die Lok unter mit keinem Trick schneller beschleunigen kann als hier eingestellt. Natürlich kann man die Anfahrverzögerung wieder auf einen kleineren Wert programmieren.
ESU gibt als Hinweis für den Wert an: Der Wert in CV 3 multipliziert mit 0.869 ergibt die Zeit vom Stillstand bis zur Maximalgeschwindigkeit. Bei einem ESU Default-Wert von 8, ergibt sich eine Zeit von etwa 7 Sekunden bis zur Höchstgeschwindigkeit.
Diese Zahl gilt aber nur bei ESU, andere Herstelle haben eine andere Messlatte.
Decoder Bremsverzögerung
Manche Decoderhersteller bezeichnen diesen Wert auch als Trägheit.
Der Wert in CV 4 bestimmt, wie lange der Decoder warten muss, bis er beim Abbremsen auf die nächste Fahrstufe runterregeln darf.
Je grösser der Wert in CV 4 ist, desto länger wird der Bremsweg bis die Lok halten kann.
Wählt man diesen Wert zu gross, dann passiert es sehr schnell, das man die Lok am Gleisende nicht rechtzeitig zum stehen bekommt, weil man den Bremsweg unterschätzt hat.
ESU gibt als Hinweis für den Wert an: Der Wert in CV 4 multipliziert mit 0.869 ergibt die Zeit von Höchstgeschwindikeit bis zum Stillstand. Bei einem ESU Default-Wert von 6, ergibt sich eine Zeit von etwa 4,8 Sekunden bis zum Stillstand. Diese Zahl gilt aber nur bei ESU, andere Hersteller haben eine andere Messlatte.
Abschalten der Beschleunigungs- und Bremsverzögerung
Die meisten Decoder sind so programmiert, dass die Verzögerungen per Lokfunktion ausgeschaltet werden können.
Sowohl ESU als auch Lenz Decoder verwenden dazu standardmässig die Funktion F4. Ist die Lokfunktion F4 aktiviert, dann schaltet der Decoder ohne Wartezeit direkt in die gewünschte Fahrstufe rauf oder runter. Dies wird vom Computer oder auch von der Zentrale zum Beispiel bei einem Nothalt verwendet.
Dann wird:
- zuerst an alle Fahrzeuge der Befehl zum Ausschalten der Bremsverzögerung gesendet
- und dann der Befehl zum sofortigen Halt.
Welchen Wert einstellen?
Fährt man seine Modellbahn überwiegend manuell mit dem Handregler ist die Anfahr- und Bremsverszögerung eine feine Sache, um ruckartige Steuerungen zu vermeiden und Züge weich fahren zu lassen.
Steuert man seine Züge aber mit dem Computer, so bietet die Modellbahnsteuerung bessere Möglichkeiten dieses zu erreichen.
Hier sollte man relativ niedrige Verzögerungen einstellen. Dies hat zwei Gründe:
- Der Computer kann die Geschwindigkeit wesentlich flexibler regeln als die starre Decodereinstellung erlaubt.
- lange langsame Bremsrampen auf freier Strecke
- steile schnellere Bremsrampen in kurzen Nebengleisen im Bahnhof
Überfahren der Haltepunkte
Zu grosse Verzögerungen behindern den Computer bei der exakten Berechnung von Bremsrampen und Haltepunkten. Dies führt dann zum Überfahren der Haltepunkte.
In den meisten Fällen sind die voreingestellten Werte für das manuelle Fahren ausgelegt. Für die Computersteuerung sollte man die Werte etwas niedriger einstellen.
Verzögerungen Null
Viele Spezialisten empfehlen die Verzögerungen auf 0 oder 1 zu setzen. Dies hat aber einen gravierenden Nachteil. Einige Decoder nutzen intern immer 128 Fahrstufen, auch wenn man nur 28 Fahrstufen ansprechen kann. Diese zwischenfahrstufen werden mit der Anfahr-/Bremsverzögerung benutzt um ohne ruckeln von einer auf die nächste Decoderfahrstufe hoch-/runter zu schalten.
Werden die Verzögerungen auf 0 oder bei einigen Decodern auf 1 gesetzt, dann werden auch die Zwischenfahrstufen abgeschaltet und es kann bei jedem Geschwindigkeitwechsel ein kleiner Ruck entstehen.
- Empfehlung: man wählt den niedrigsten Wert, bei der Verzögerung, der die Zwischenfahrstufen nicht abschaltet. Welcher Wert das ist, muss man im Handbuch seines Decoders nachschauen. Wenn man dies nicht hat, so nimmt man sicherheitshalber den Wert 2 oder man probiert eben aus, wie sich der verwendete Decoder verhält.
Vorteile der Decoder Verzögerungen
- Über CV 3/4 eingestellte Verzögerungen wirken auch, wenn man den Zug über einen Handregeler fährt.
- Die Verzögerungen bewirken ein ruckfreies Beschleunigen und Bremsen.
Nachteile der Decoder Verzögerungen
- Die Verzögerungen behindern das exakte Berechnen von Bremsrampen und Haltepunkten
- Verzögerungen können zum Überfahren von Haltepunkten führen.
- Der Computer kann unterschiedliche Fahrverhalten verschiedenere Loks nur schlecht kompensieren und ausgleichen.
Soundlokomotiven
Bei Soundlokomotiven ist die Anfahrverzögerung meist relativ hoch eingestellt, weil gerade das langsame Hochregeln der Geschwindigkeit zusammen mit einem synchronisierten Sound erst das wahre Lok-Erlebnis ausmacht.
Weblinks
- TC-wiki: Loks einmessen: Wofür brauche ich den Bremsausgleich?
- TC-wiki: Decoder: Einstellen von Minimal- und Höchstgeschwindigkeit
- --DieterN 10:38, 28. Jan. 2010 (UTC)
- bearbeitet: Wohlmannstetter 19:24, 29. Apr. 2010 (UTC), Wohlmannstetter 16:55, 7. Mär. 2021 (CET), Uslex (Diskussion) 06:37, 18. Dez. 2025 (UTC)
