Remcompensatie - adaptief remmen: de samenhang
| Verwendung |

|
Remcompensatie en adaptief remmen (ABP)
Doel en achtergrond van adaptief remmen
In het TC-Forum heeft TC-consultant Michael Mertner de verbanden heel gedetailleerd uitgelegd:
Adaptief remmen en remcompensatie zijn twee totaal verschillende dingen. Het ene bouwt voort op het andere, meer niet.
De remcompensatie wordt in principe ALTIJD gebruikt. Ongeacht of je adaptief remt of niet.
Ik kan elke gebruiker alleen maar aanraden om een beetje moeite te doen bij het instellen van de remcompensatie en geen waarden "uit de duim" in te voeren die wel of niet passen.
Kort en bondig: De remcompensatie is een verhoudingswaarde die aangeeft hoe "goed" de locomotief reageert op de reductie van het snelheidsniveau bij het remmen. Door de instellingen van de decoder is er altijd een kleine afwijking, laten we het massatraagheid noemen. De remcompensatie compenseert deze massatraagheid, hij regelt als het ware de remdruk.
Remcompensatie
Laten we een blok nemen met een remhelling van één meter en een verplaatste stopmarkering met een afstand van deze ene meter. Dit is een klassiek voorbeeld van remmen en stoppen met een enkele sensor in het blok.
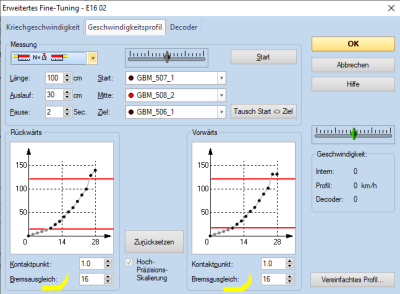
- Fig: Remcompensatie

De locomotief nadert nu met 80 km/u en begint te remmen. Na 1,20 meter komt hij tot stilstand. Om dit te compenseren, verhoog je de "remdruk" - d.w.z. de waarde van de remcompensatie - met een paar eenheden en laat je de locomotief onder dezelfde omstandigheden opnieuw dit blok binnenrijden.
Doe dit tot hij op EXACT één meter tot stilstand komt. Zo bepaal je voor het eerst de juiste waarde van de remcompensatie.
Adaptieve remprocedure (ABP)
En dit is precies waar de beslissing ten gunste van de Adaptive Braking Procedure (ABP) (ABP) in het spel komt. Als je het goed doet, kun je de locomotief nu met 120 km/u het blok in laten rijden. Met een zorgvuldig gemeten snelheidsprofiel, een goed digitaal systeem en constante externe omstandigheden (temperatuur, toestand van het spoor, stroom, koffietoevoer, enz.) zou de locomotief na precies één meter tot stilstand moeten komen, zelfs bij de hogere snelheid. Hij remt nu scherper.
Maar waarschijnlijk raakt hij de meter niet precies. Als hij te ver komt, verhoog dan de remcompensatie een beetje. Hij zal dan iets eerder stoppen bij 80 km/u, maar iets eerder bij 120 km/u. In de regel geldt: hoe hoger de snelheid, hoe groter het effect van de waarde in de remcompensatie.
Dit heet dan de gemiddelde waarde bepalen, dus een acceptabel gedrag bij beide snelheden. Als je dit op geen enkele manier kunt bereiken, kun je nu proberen het gedrag te verbeteren via de decoderinstellingen (remvertraging, eventueel snelheidstabel).
Niet vergeten: Wanneer je met de snelheidsparameters in de decoder rommelt, moet je volledig opnieuw kalibreren. Dit is niet nodig bij het wijzigen van de remvertraging. In dit geval hoeft alleen de remcompensatie opnieuw te worden afgesteld.
Ga nu nog een stap verder en vergroot de remhelling en afstand van één meter naar 1,50 meter of zelfs twee meter en laat hem opnieuw het blok ingaan met 80 km/u en vervolgens met 120 km/u. Hij moet nu bij beide snelheden na precies twee meter tot stilstand komen.
Let wel, ZONDER ondertussen de waarde van de remcompensatie aan te passen. In het ideale geval stopt de locomotief op het aangegeven stoppunt in alle vier de situaties met dezelfde remcompensatiewaarde.
Ik zeg het maar meteen: dit wordt een uitdaging. Ik heb ooit de moeite genomen om een locomotief zo in te stellen dat hij altijd op het juiste punt stopt vanaf verschillende snelheden met verschillende hellingen en afstanden.
- Conclusie: ik heb niet genoeg tijd over om alle locomotieven op deze manier in te stellen.
Compromis
Nu heb je de keuze: of je sluit een compromis en accepteert kleine onnauwkeurigheden, waarbij "klein" moet worden gedefinieerd door elke individuele gebruiker....
- of je stelt in ALLE blokken dezelfde parameters in voor afstand en remhelling - wat vaak niet werkt...
- of je gebruikt echte stopdetectoren, d.w.z. een "echte" sensor om te stoppen...
- of - daar komt het - je gebruikt adaptief remmen (ABP). Hier worden de locomotieven tot stilstand gebracht met de waarden van de - hopelijk zorgvuldig bepaalde - remcompensatie.
Adaptief remmen is daarom gebaseerd op remcompensatie. Als de remcompensatie niet / slecht / onjuist is afgesteld, zal het adaptief remmen ook falen.
Misschien terzijde: De waarde van de remcompensatie is zeer zelden nul. Dit zou betekenen dat de locomotief EXACT tot stilstand komt op het moment dat snelheidsniveau nul wordt verstuurd. Dit gebeurt maar heel zelden. Zeer snelle systemen hebben hier vaak waarden van één cijfer, wat respectabel is. Standaardsystemen hebben een tweecijferige waarde van 10-30. Meer is weer vreemd, maar gebeurt bijvoorbeeld als de remvertraging in de decoder relatief hoog is ingesteld.
Dit is overigens geen beoordeling van digitale systemen, maar slechts een kenmerk. Dit is erg belangrijk. Kleinere waarden zijn niet "beter" dan hoge waarden.
Dit is precies de reden waarom er geen negatieve waarden zijn voor remcompensatie. Dit zou betekenen dat de machinist ook een "glazen bol-instrument" in de cabine heeft, omdat de locomotief dan zou stoppen VOORDAT de snelheidsstap nul werd verzonden.
Bij het bepalen van de remcompensatie rijden locomotieven ALTIJD eerst te ver door, ze stoppen nooit voor de afstand. Als ze dat wel doen, is het snelheidsprofiel niet correct.
Werkingsmechanisme van ABP
In dit artikel geeft de heer Freiwald gedetailleerde achtergrondinformatie over hoe ABP werkt:
ABP verbetert de nauwkeurigheid van berekende stopplaatsen. Met ABP wordt een trein die in een blok moet stoppen afgeremd met individuele waarden voor snelheden en remhellingen. Deze waarden worden individueel aangepast aan de trein om ervoor te zorgen dat deze zo nauwkeurig mogelijk op de gewenste positie tot stilstand komt.
Je zult nauwelijks enig effect merken van ABP op een locomotief met optimaal afgestelde remcompensatie.
Op een locomotief met een nogal slecht afgestelde remcompensatie, zul je het effect van ABP heel duidelijk merken. De locomotief zal merkbaar zijn snelheid verminderen voor een blok met een treinstop. De stopnauwkeurigheid is meestal echter ook aanzienlijk verbeterd.
Vuistregel: Hoe merkbaarder het effect van ABP is, hoe slechter de remcompensatie is ingesteld.
Locomotief niet correct gekalibreerd
De heer Freiwald geeft een hint in dit forumbericht:
Als ABP leidt tot duidelijk veranderd rijgedrag voordat een blok wordt ingereden, zijn ofwel de instellingen in het blok niet correct of de locomotief in kwestie was niet correct gekalibreerd. (trefwoord: remcompensatie).
In dit geval geeft ABP daarom een indirecte waarschuwing hierover. Het uitschakelen van ABP neemt niet de oorzaak weg, maar alleen de symptomen van het probleem.
Echte stopdetector
Vraag 1: Zal de remcompensatie van een locomotief effectief zijn in een blok met een echte stopmelder maar een verplaatste remmarkering, ook al is deze misschien niet optimaal?
Antwoord 1: Zoals beschreven is de remcompensatie ALTIJD actief! Niet optimaal afgesteld is onzin. De remcompensatie kan worden beschouwd als de belangrijkste parameter in het locomotiefprofiel.
Remmen zonder ABP
Vraag 2: Werkt de remcompensatie ook op de een of andere manier als het adaptief remmen is uitgeschakeld?
Antwoord 2: Ja, remcompensatie is ALTIJD actief. Adaptief remmen beslist hoe het wordt afgehandeld.
Aankomst bij 80 km/u
(uit dezelfde thread in het TC forum, het antwoord komt ook van Michael Mertner):
In sommige blokken rijd ik 50 of 60 km/u, in de stationsblokken 80 km/u en in de "snelste" blokken is 200 km/u toegestaan. De blokken met 50, 60 en 80 km/u hebben maar één melder, in de andere zijn er echte stopmelders. Moet ik nu een gemiddelde snelheid van 125 km/u gebruiken voor de remcompensatie of moet ik me concentreren op de blokken met verschoven stopmarkeringen bij 65 km/u (met een helling van 35 cm)?
Antwoord: Begin gewoon met de locomotief het blok in te laten rijden met 80 km/u en kijk hoe hij stopt.
Te hard remmen
Los daarvan is mijn persoonlijke mening hier dat remmen van 65 km/u tot nul binnen 35 cm behoorlijk sportief is. Dat is een remweg van ongeveer 30 meter op het prototype, dus nog geen twee locomotieflengtes.
Geen enkel spoorvoertuig kan dat vanaf 65 km/u. Zelfs niet in de buurt. Zelfs met een sterke vertraging van 2,6 m/s² zouden we nog steeds een remweg van 50 meter hebben. Er stopt echter bijna niemand en een trein van enkele tientallen tonnen zal dit vanwege de fysica nooit voor elkaar krijgen.
Dit geldt natuurlijk niet voor de modelspoorbaan. Hier zijn gekke vertragingswaarden van 25 m/s² geen probleem, ook al zouden alle passagiers daarna alleen nog jam zijn.
- Stel je voor dat een "echte" ICE dat zou doen:
- van 80 km/u tot 0
- een remafstand van 9 meter.
Dat is ongeveer 25 m/s² of, omgerekend, iets meer dan 2,5 keer de versnelling door de zwaartekracht (g). Klinkt niet veel, maar ik stap echt niet op die trein...
Maar een modelspoorbaan kan dat wel... Locomotieven stoppen soms al na minder dan een centimeter van een fatsoenlijke snelheid.
Als dit al gebeurt, moet dit alleen in verborgen ruimtes gebeuren.
Nou, het zij zo. Het is gewoon mijn mening...
Normaal remmen
De locomotief rijdt dus eerst met 50 km/u het blok binnen en de remcompensatie wordt dan zo afgesteld dat hij na 35 cm tot stilstand komt.
Laat de locomotief dan met 60 km/u het blok binnenrijden. Als hij iets verder rijdt, verhoog dan de remcompensatie met één of twee punten. Het verschil zou toch niet al te groot moeten zijn. Als hij nu remt, kan hij een centimeter eerder stoppen bij 60 km/u en een halve centimeter eerder bij 50 km/u. Er zijn hier geen algemeen geldende waarden. Dit is zeer individueel voor elk voertuig.
Doe de hele procedure vervolgens opnieuw bij 80 km/u. Ga op dezelfde manier te werk; als hij te vroeg stopt, verminder dan de remcompensatie en kijk hoe hij remt bij 50 of 60 km/u. In het ideale geval stopt hij op hetzelfde punt bij alle drie de snelheden. Nu komen de bovenstaande punten weer om de hoek kijken:
- Accepteer een kleine onscherpte of
- Pas de decoderparameters aan of
- Gebruik adaptief remmen.
Adaptief remmen
Bij adaptief remmen wordt de remcompensatie in het bovenstaande geval bepaald op 50 km/u, d.w.z. de langzaamste snelheid. Dit moet dan echter ook juist zijn.
Als de locomotief nu in de adaptieve remmodus rijdt, wordt er op een bepaald punt in het voorblok geremd tot deze 50 km/u. Het is bewust NIET gedocumenteerd WAAR de locomotief remt. Dit kan al dan niet bij het remmerkteken op het voorste blok zijn.
In elk geval zorgt adaptief remmen ervoor dat de locomotief wordt afgeremd met de remcompensatie die het LAATSTE werd gebruikt. Het voordeel is dat de locomotief remt met bekende parameters. Het nadeel is dat het de snelheid iets eerder vermindert. Ik zou dit alleen doen met echt onwillige voertuigen ;-). Aan de andere kant zijn er nu vrijwel geen aanwijzingen op het forum dat de locomotief verkeerd stopt ondanks adaptief remmen. Toch wel opmerkelijk, niet? De aanpak van de ontwikkelaar is hier herkenbaar en werpt zijn vruchten af ;-)
Hoe je het nu implementeert hangt af van de smaak van de gebruiker. Sommigen willen dynamisch en flexibel remmen, anderen maakt het niet uit, het belangrijkste is dat de treinen op het juiste punt uitkomen. Het eerste kost moeite, het tweede levert snel resultaat. Iedereen moet voor zichzelf beslissen.
Weblinks
- Bron: Forum
- ABP: Forum
- Achtergrondinformatie: Remcompensatie en ABP
- --Digi thomas2003 (Diskussion) 09:42, 14. Okt. 2020 (CEST)
- bearbeitet: Uslex (Diskussion) 10:30, 14. Mai 2022 (CEST), Uslex (Diskussion) 14:22, 6. Dez. 2025 (UTC)
